Objectives
The main goal of the robot is that it can cross a gap by placing a bridge on it. This performance can be divided in different tasks, each one visualized as a reachable objective on its own.
Design
The design process of the robot comprises the design of the mechanical parts, the choice of the electronic components, the PCB design and the creation of the software for controlling the system.
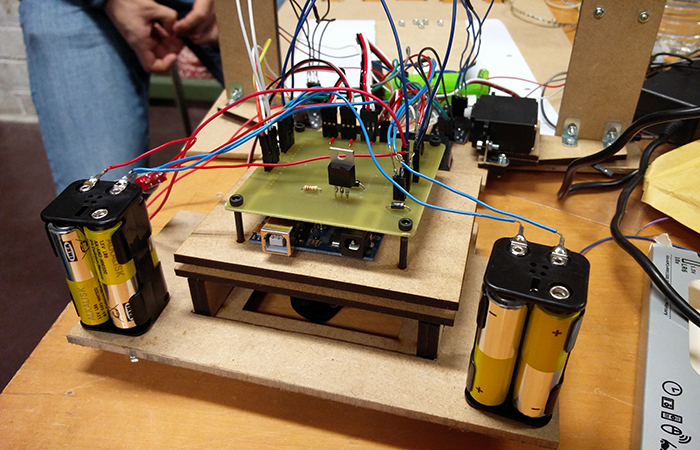
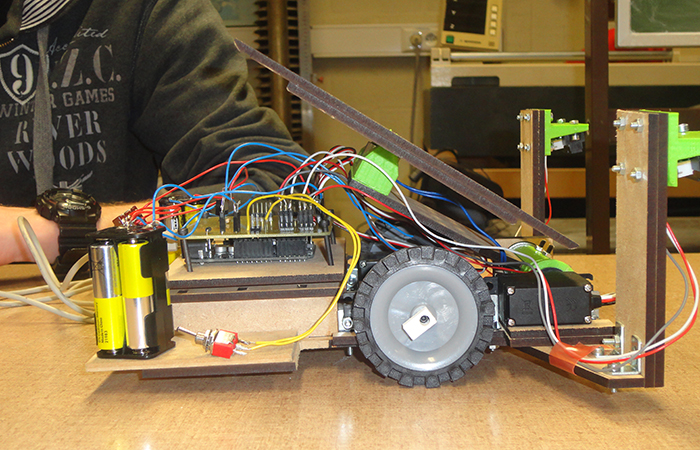
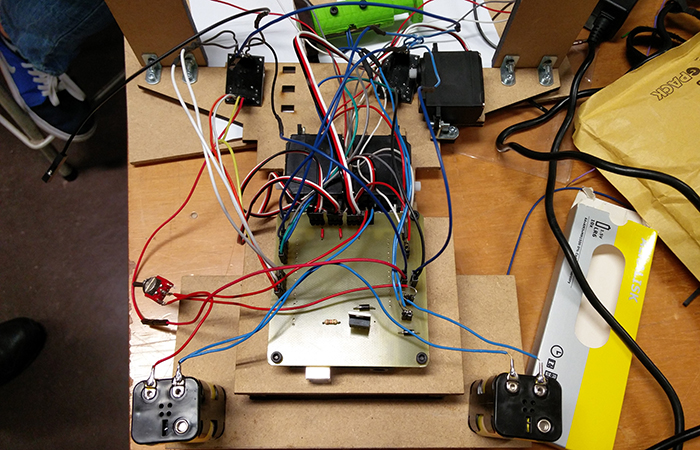
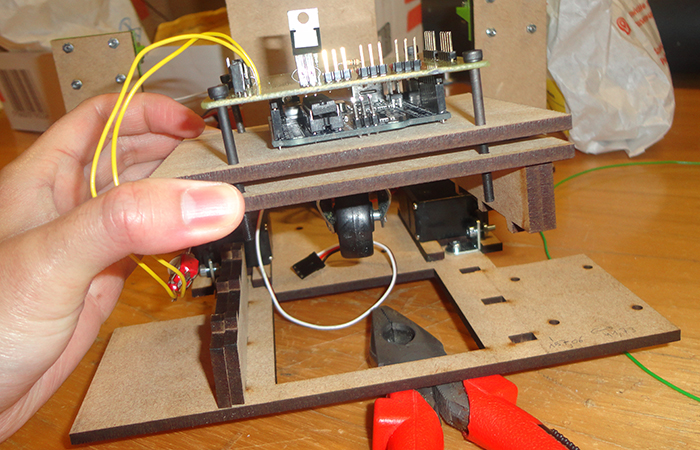
Building and testing
Here you will find some pictures and videos of the building and testing processes.
Robot operation
The behaviour of the robot can be found in this section.
Gallery