Overview
As some people might know, there exists a
soccer-competition called 'Robocup'. In different
categories, robots of different sizes play soccer
against each other. The end goal of the Robocup
challenge is to create a team of soccer playing robots
that can defeat the present world champion soccer in
2050. For more information, check out the website of the
Robocup:
http://www.robocup.org
There’s also something like the RoboCup Junior robot
competition. The youth (8-14 years old) are invited to
build a robot so they can taste the fascinating world of
robotics. The robots have to play soccer one on one with
a ball of 8 cm in diameter that transmits IR-rays (see figure 1). The field
(see figure 2) is covered with a gray gradient from
white to black. This makes it possible to determine the
vertical position and the orientation of the robot on
the field by using light sensors. Distance sensors are
used to detect the sides of the field and to determine
the horizontal position of the robot on the field. Using
a push button, you can set whether the goal of the
opponent is in the black or the white part of the field.
A switch is used to start or stop the robot on command
of the arbitrator.

Figure 1: The ball
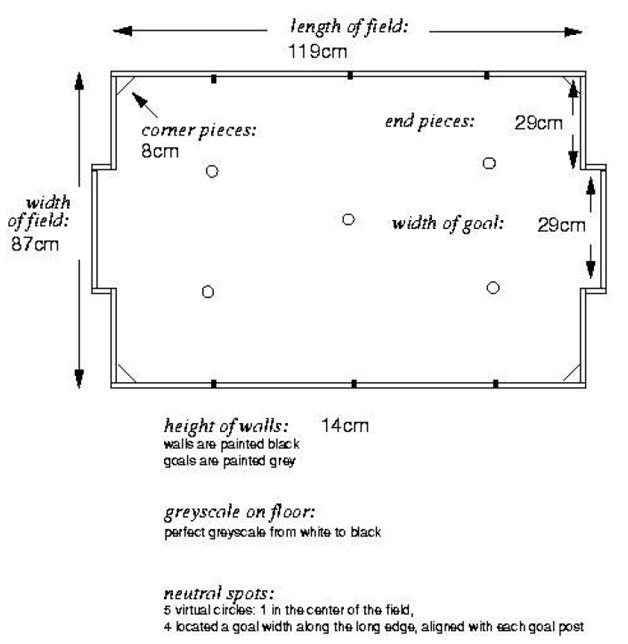
Figure 2: The field
|