.jpg)

Introduction
The idea
The goal of the Mechatronics project is to develop some expertise in domains such as mechanics, electronics and coding: it is how the "P-bot" was born. Its purpose is to follow a wire while lighting the way for people who need to go to the bathroom during the night. The elaboration of the P-bot is entirely explained throughout this website. Also the files required for the entire construction of the robot are provided.
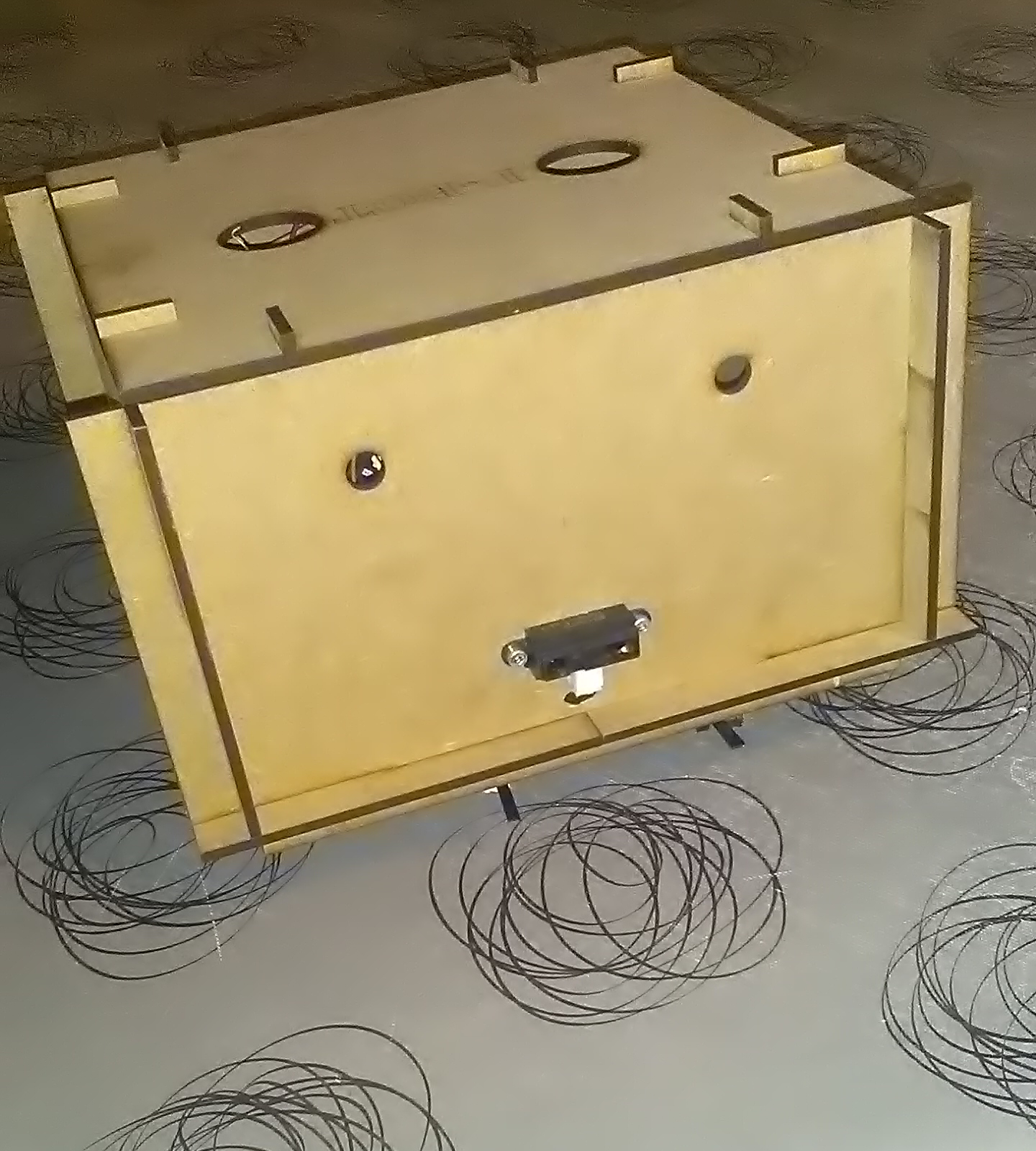
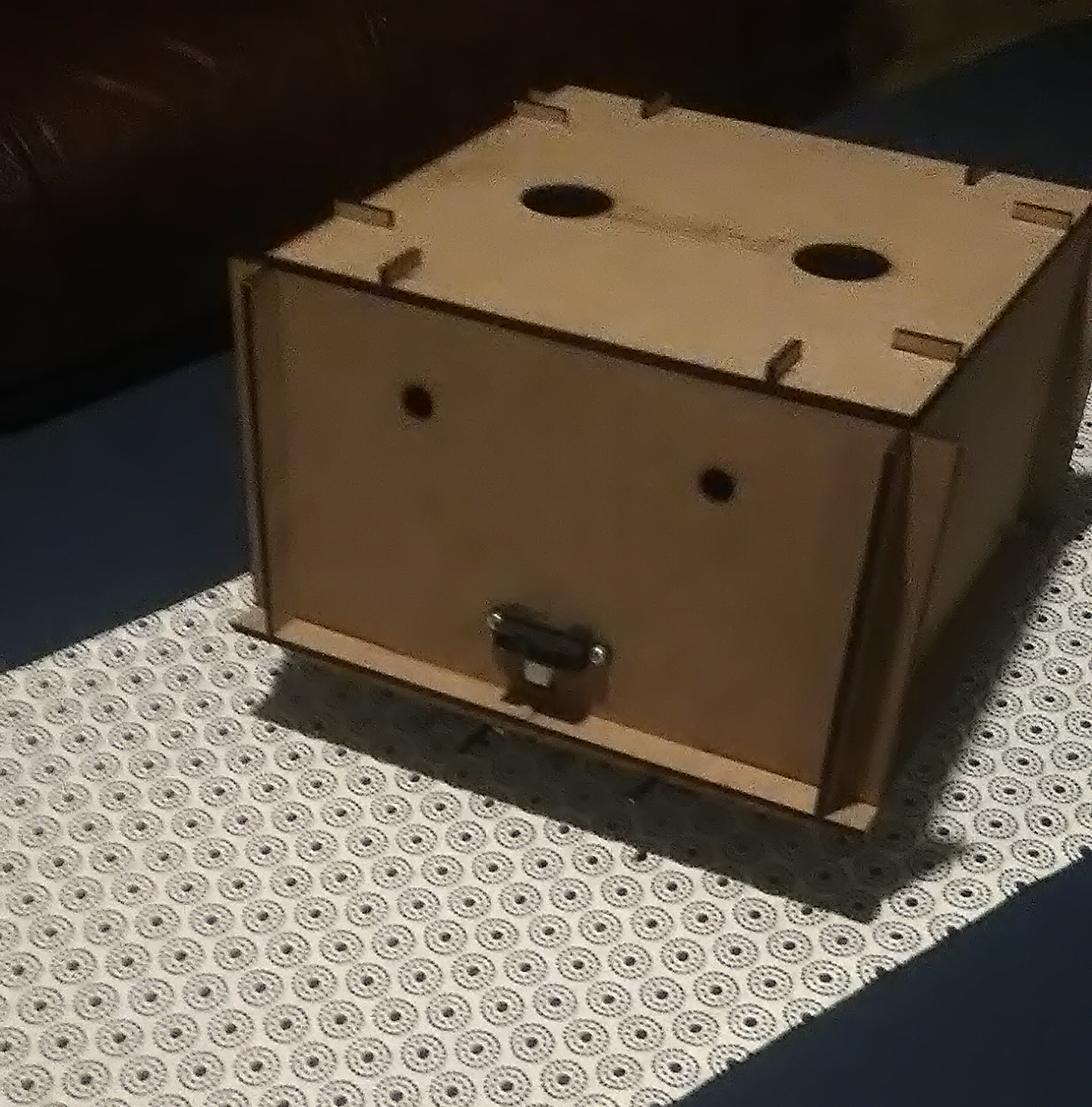
Design
Several aspects have to be taken into account when designing the robot. Of course it must fulfill its principal function, but tt has to be easy to assemble and disassemble to have an optimal design. Furthermore, the robot structure has to have some resilience and must be able to contain all the internal parts (control mechanisms, gears etc.). The general idea of the structure and the design choices are explained in this part.
Mechanics
The mechanical part of the robot is essentially the one which ensures the motion. It has has to take in to account the type of motion required for the general purpose. It was done by the choice of the type of motor and the disposition of the wheels. Also, a gear mechanism was designed in order to increase the speed.
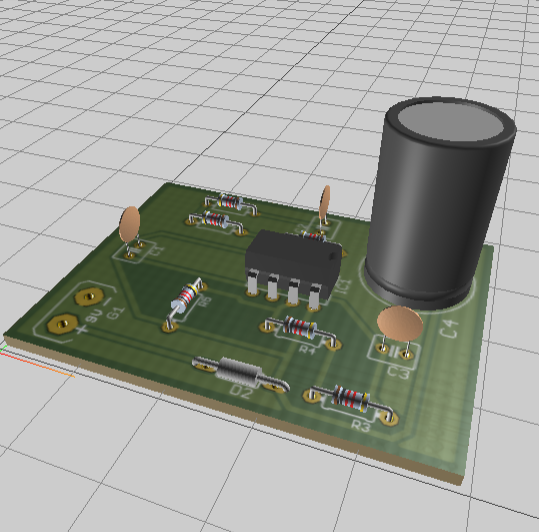
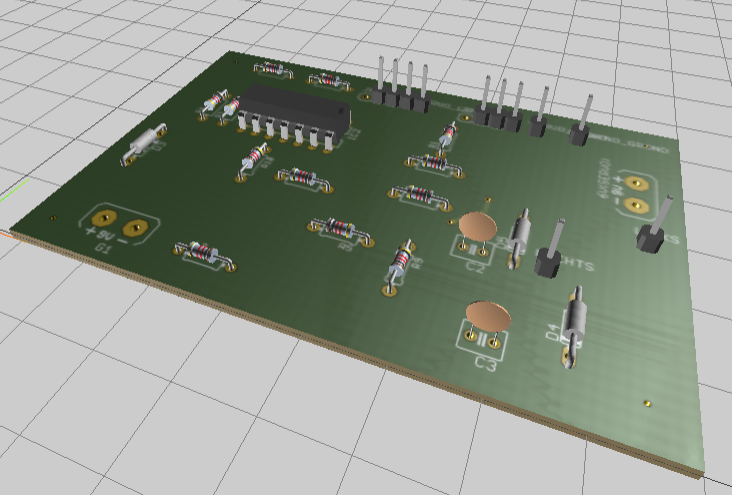
Electronics
The electrical part is composed of the choice of the appropriate components and the design of some PCB's with the program Eagle. The PCB's are essential for the inductive guidance.
Programming
The robot is controlled by a microcontroller: an Arduino Uno. The coding part contains the programmation of this microcontroller.