Vrije Universiteit Brussel
Veronica: Variable joint Elasticity RObot with a Neuro-Inspired Control Approach
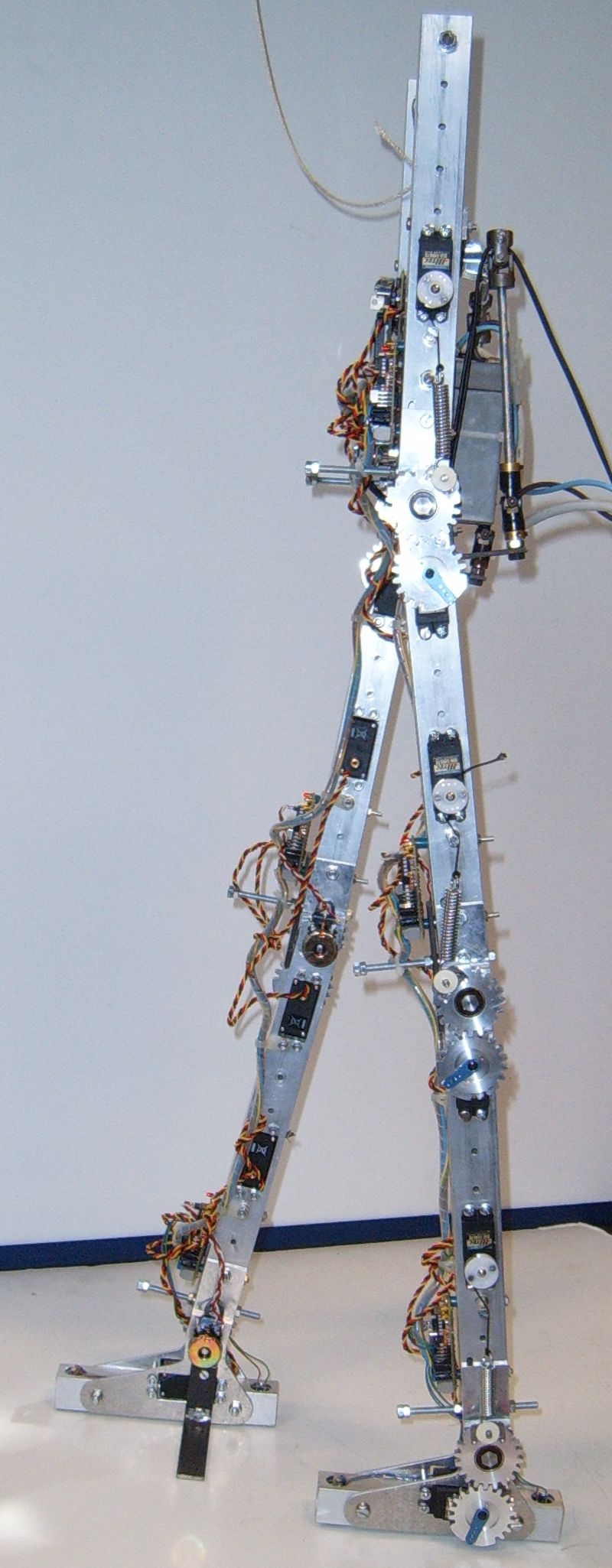
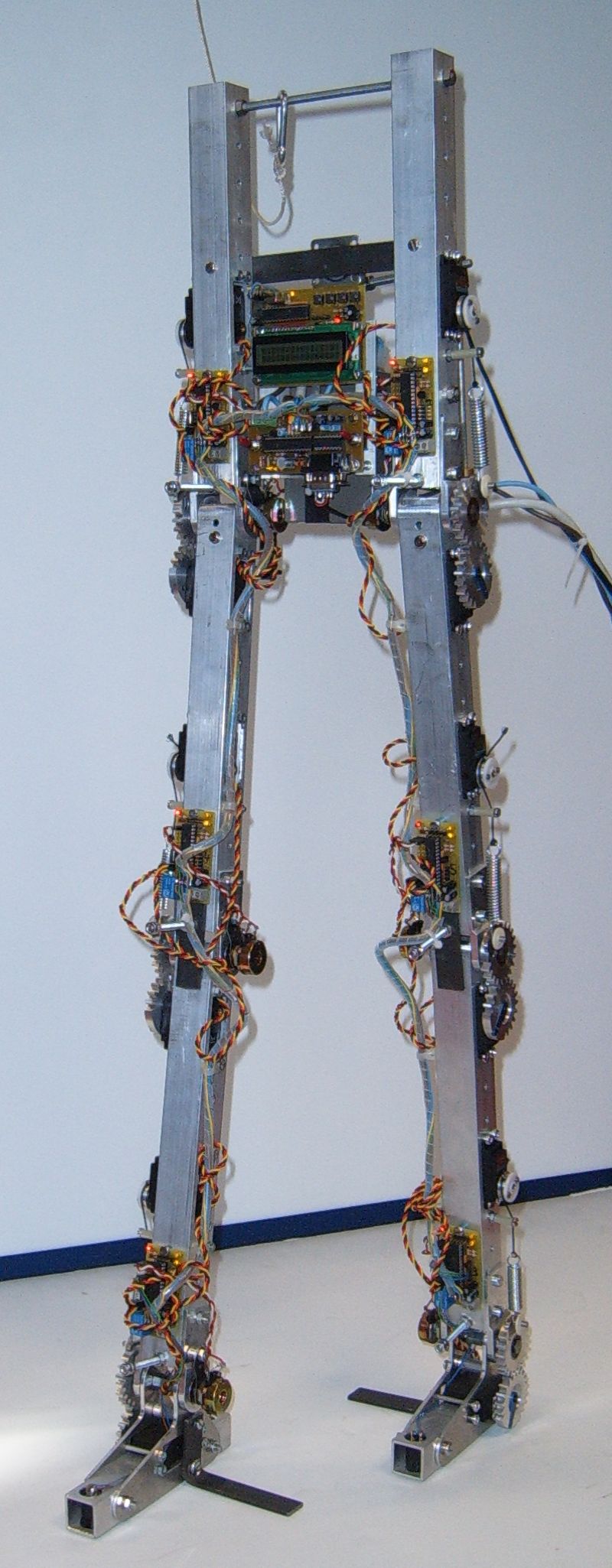
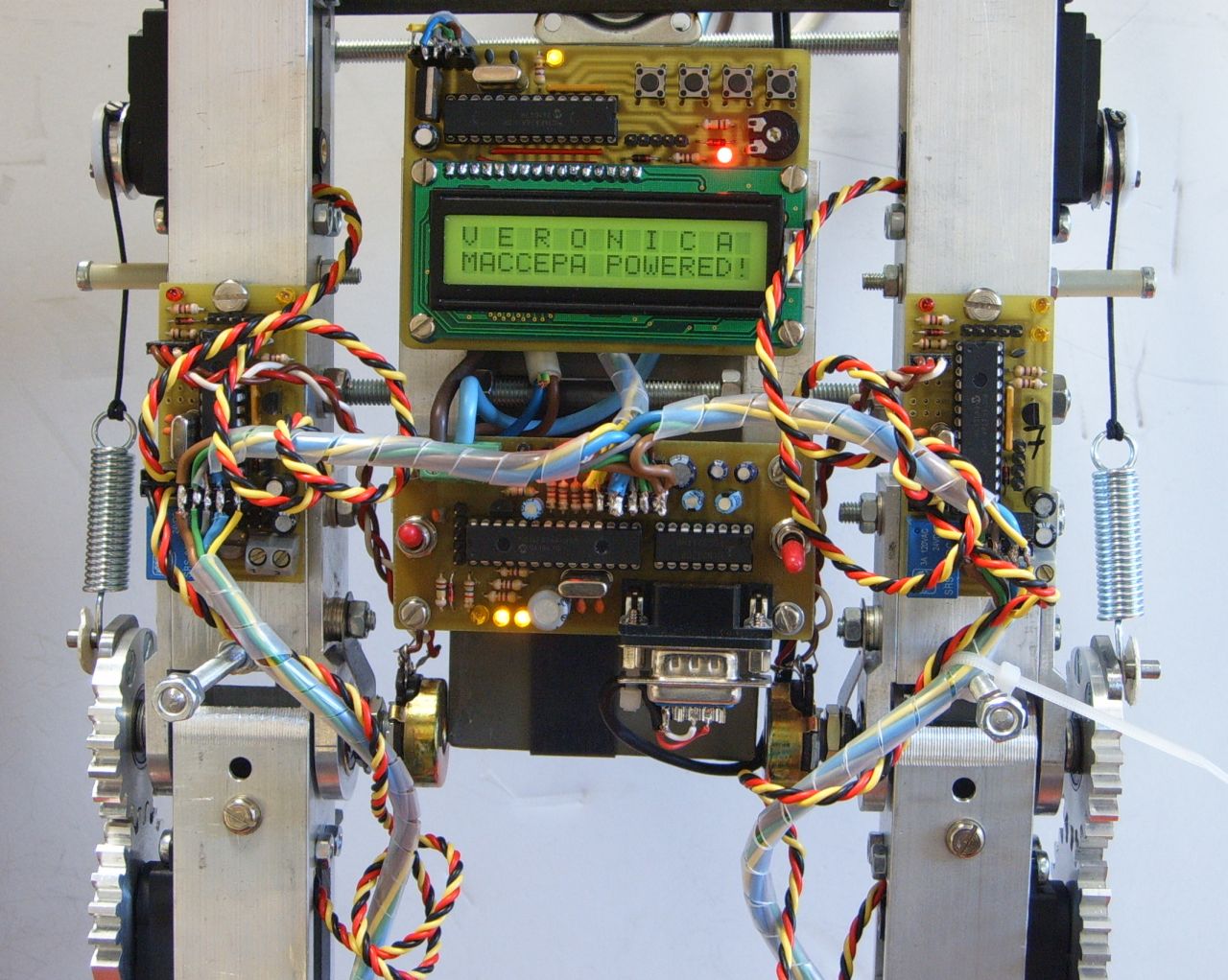
VERONICA (Variable joint Elasticity RObot with a Neuro-Inspired Control Approach) is the first biped equiped with the MACCEPA actuator. In passive walkers, the natural frequency of each limbs is defined by the mass distribution in the legs. So, it is fixed during design and cannot be changed during walking. This results in the fact that passive walkers have one predefined walking speed. Veronica will walk using Controlled Passive Walking. Here the control strategy is to change the natural frequencies of the limbs by using actuators with adaptable compliance. This allows to change the walking speed of a passive based walking robot. Experimental results
show that effective walking transitions between different walking
speeds and step lengths are realized in both simulations and
physical robot experiments.
Publications
|
||||||||||||||||||||||||||||||||||||||||||||

©2019 • Vrije Universiteit Brussel • Dept. MECH • Pleinlaan 2 • 1050 Elsene
• Tel.: +32-2-629.28.06 • Fax: +32-2-629.28.65 • webmaster