Vrije Universiteit Brussel
MACCEPA: The Mechanically Adjustable Compliance and Controllable Equilibrium Position ActuatorIntroductionBesides the development and implementation of the Pleated Pneumatic Artificial Muscles, our research group developed a second actuator with adaptable compliance. The MACCEPA (The Mechanically Adjustable Compliance and Controllable Equilibrium Position Actuator) is a straightforward and easy to construct rotational actuator, of which the compliance can be controlled separately from the equilibrium position. Each of these parameters is set by a position controlled servo motor. Moreover, the torque is a linear function of the compliance and of the angle between equilibrium position and actual position. Thus this actuator can be seen as a fully adaptable torsion spring, where one motor sets the stiffness of the torsion spring, and another set the equilibrium position. Since this actuator has a spring it can store and release energy. This makes this actuator perfectly suitable for dynamic walking and human-robotic interfaces.
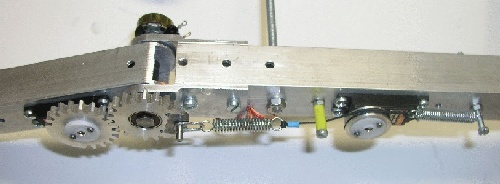
Figure 1. MACCEPA demo
Figure 2. Picture of the Slimline implementation of the MACCEPA concept
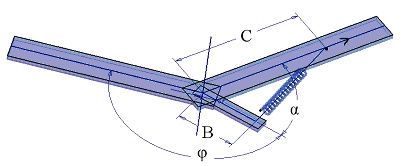
How does it work?In figure 3 the essential parts of a Maccepa are drawn. As can be seen there are 3 bodies pivoting around one rotation axis. To visualize the concept, the left body in figure 1 can be seen as an upper leg, the right body as the lower leg and the rotation axis, which goes through the knee joint. Around this rotation axis, a lever arm is pivoting, depicted as a smaller body in figure 3. A spring is attached between a fixed point on the lever arm and a cable running around a fixed point on the right body to a pretension mechanism.
Figure 3. Working principle of the Maccepa The angle f between the lever arm and the left body, is set by a classical actuator. When a, the angle between the lever arm and the right body, differs from zero, the force due to the elongation of the spring will generate a torque, which will try to line up the right body with the lever arm. When the angle a is zero--this is the equilibrium position--the spring will not generate any torque. The actuator, determining the angle f actually sets the equilibrium position. A second actuator, which pulls on the cable connected to the spring, will set the pretension of the spring. This pretension will vary the torque for a certain angle a, thus controlling the spring constant of an equivalent torsion spring.
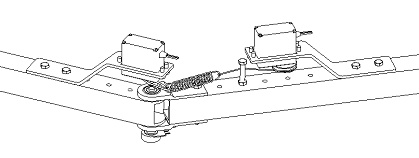
Figure 4. CAD Drawing of the Maccepa prototype In figure 4 a CAD drawing of a first realization is shown. In this prototype a classical 1D joint with roller bearing is built. The servomotor on the left, which is placed on the left body, has the same rotation axis as the joint and thus sets the angle between the left body and the lever arm, which is the equilibrium position. A number of different mechanisms can be used to pull on the cable to pretension the spring. As is shown in the right of figure 4, we opted for a second servomotor with lever arm in this prototype. By rotating this motor�s lever arm, the pretension of the spring is changed and thus also the compliance of the equivalent torsion spring in the joint. Movies
ApplicationsThe applications can be divided into groups, depending on the primary use of the compliance.Using the adaptable compliance to adjust the natural dynamics of a system. This can be done to save energy or dampen a certain movement by storing energy.
Using the compliance to make the interaction with humans safer and more natural.
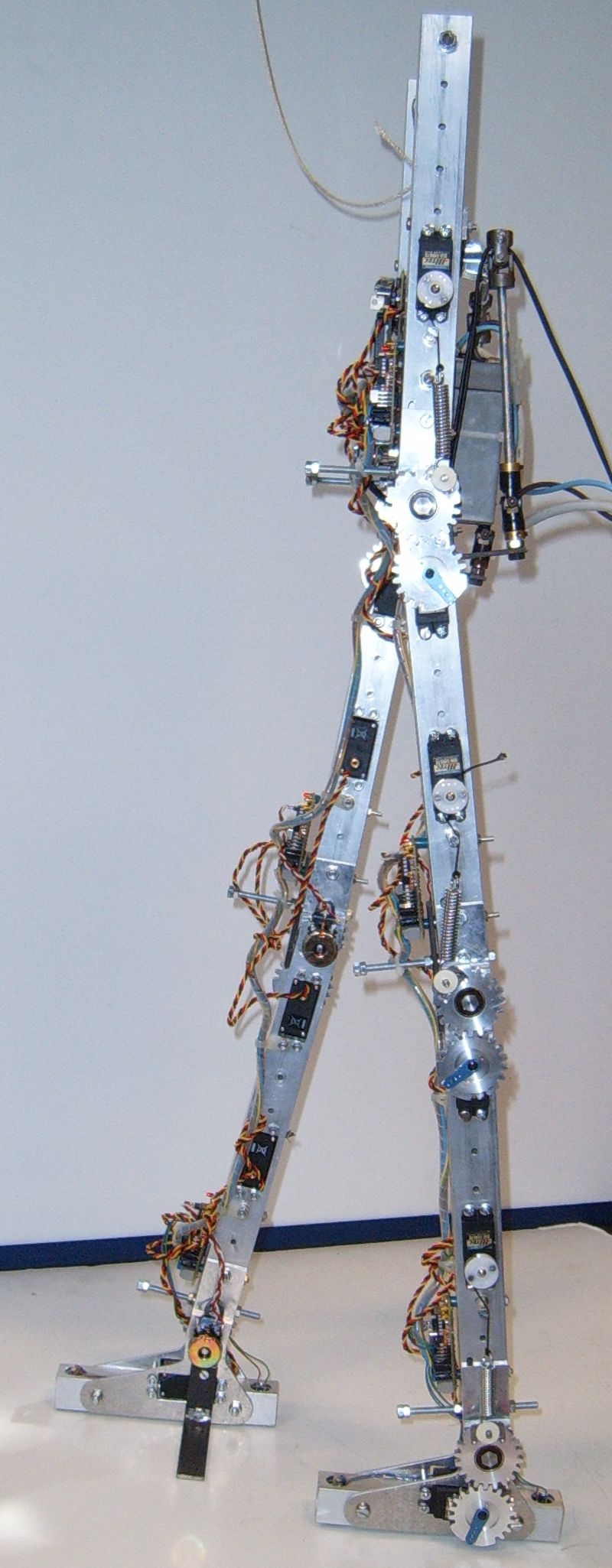
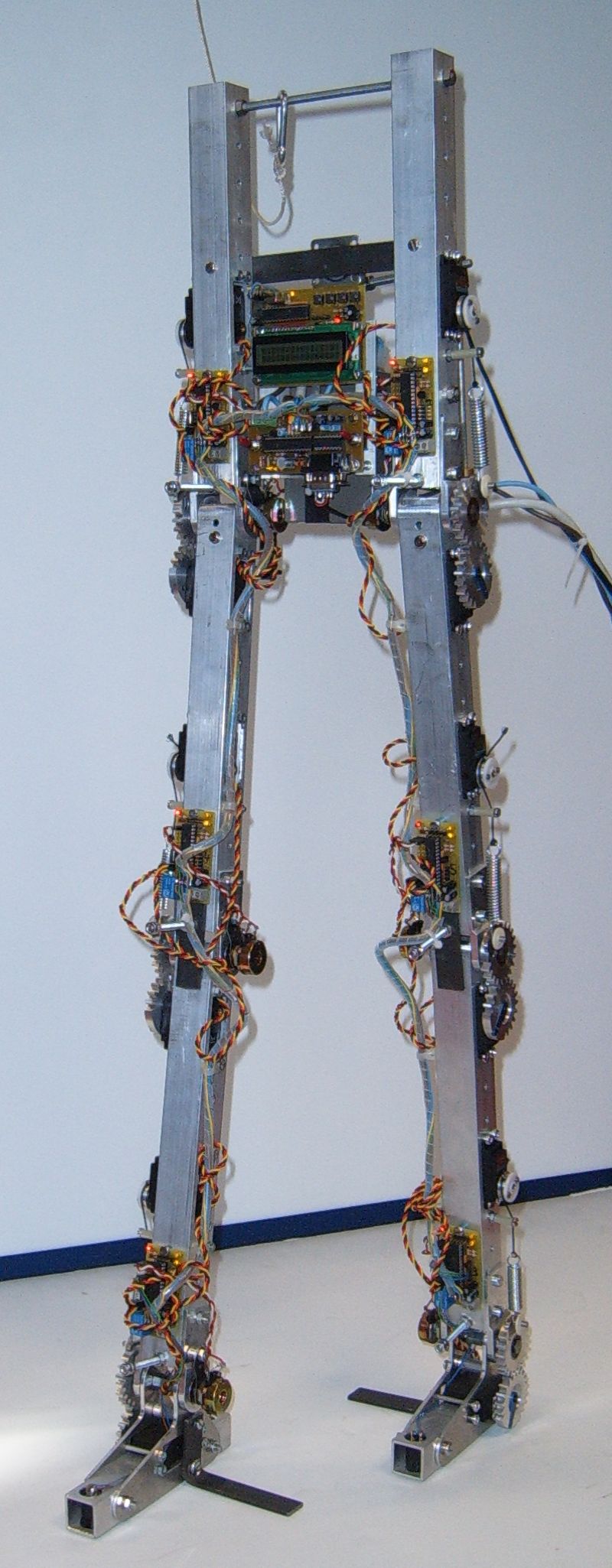
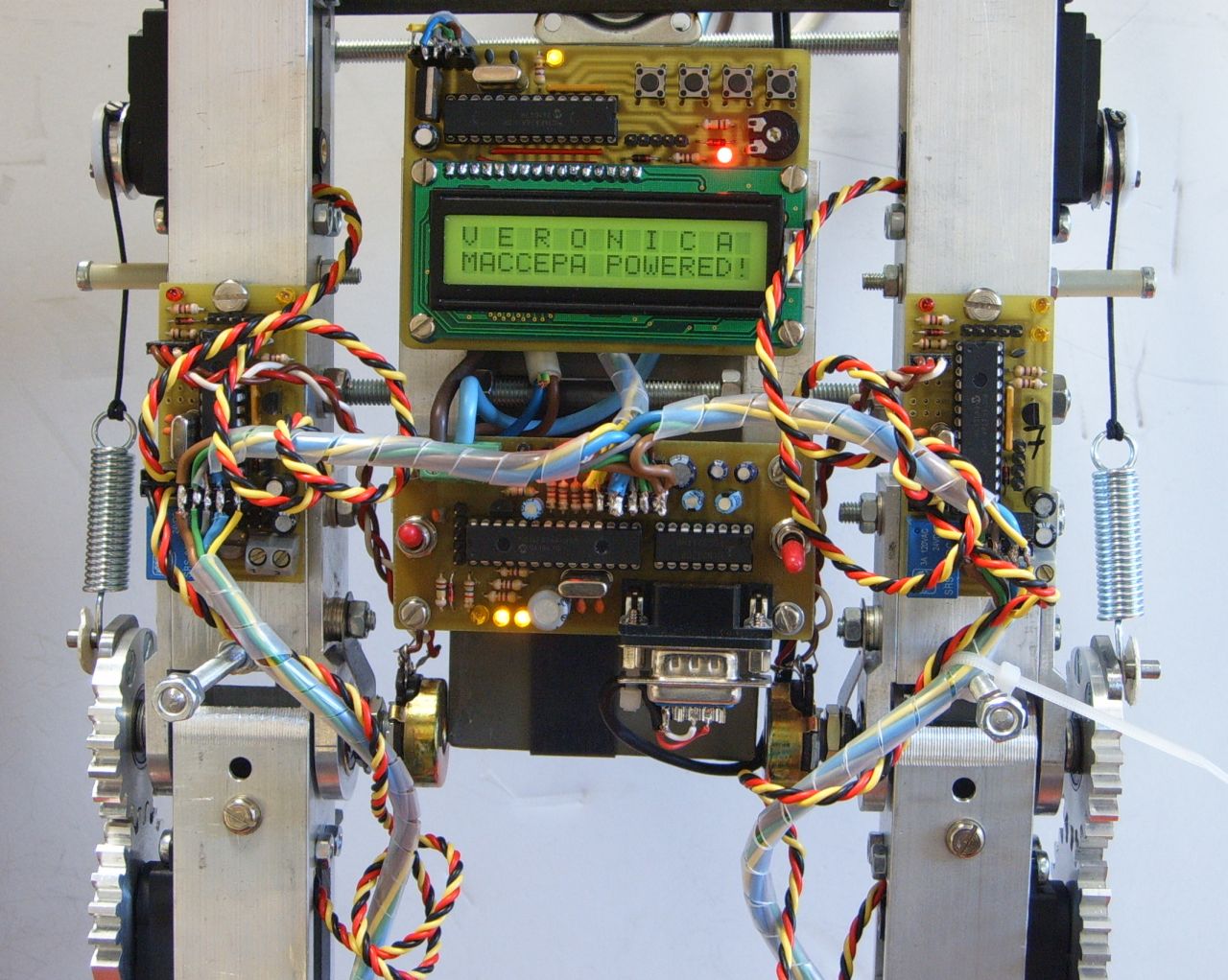
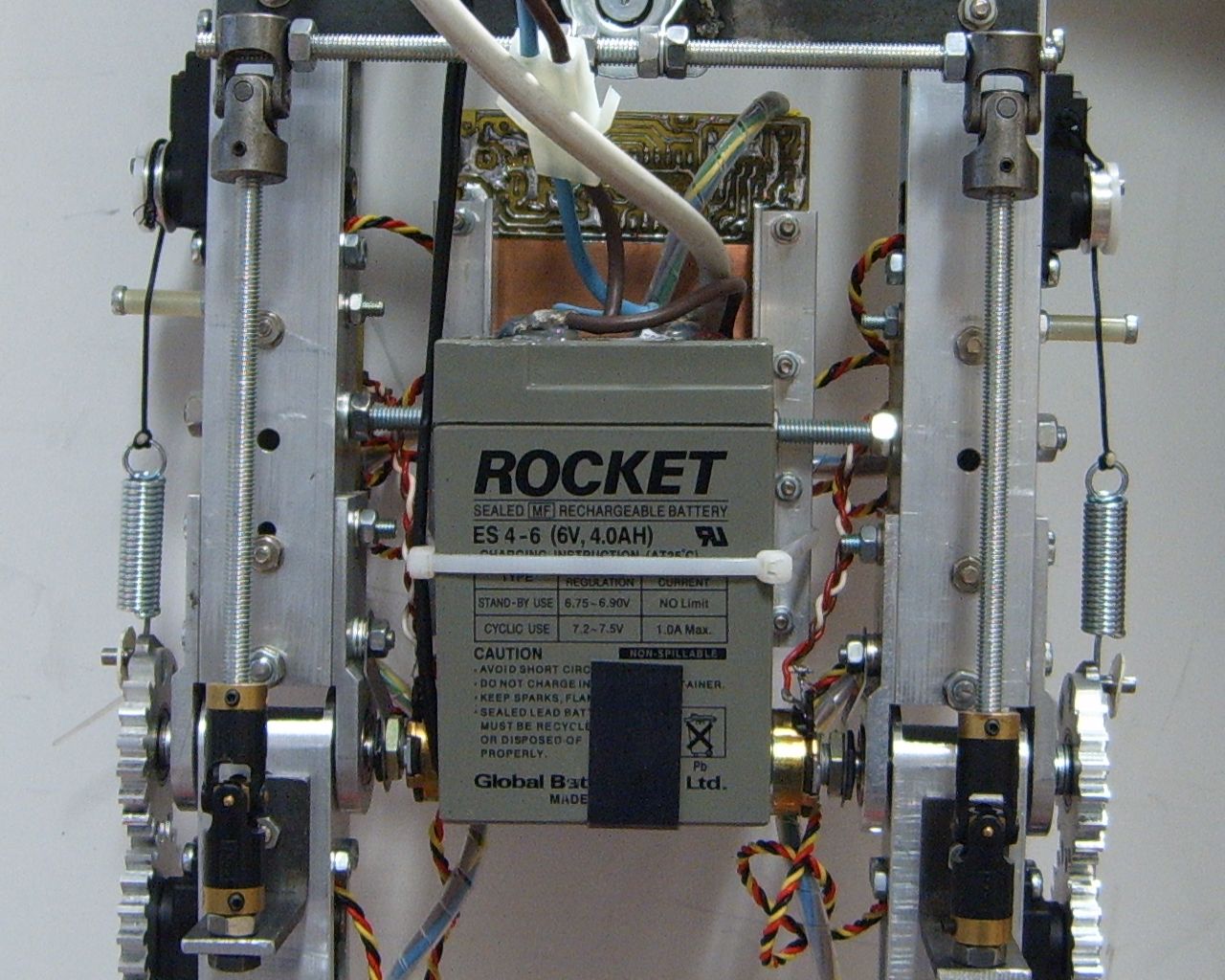
VeronicaVERONICA (Variable joint Elasticity RObot with a Neuro-Inspired Control Approach) is the first biped equiped with the MACCEPA actuator. In passive walkers, the natural frequency of each limbs is defined by the mass distribution in the legs. So, it is fixed during design and cannot be changed during walking. This results in the fact that passive walkers have one predefined walking speed. Veronica will walk using Controlled Passive Walking. Here the control strategy is to change the natural frequencies of the limbs by using actuators with adaptable compliance. This allows to change the walking speed of a passive based walking robot. Some pictures and one movie can be seen here. (The pictures can be enlarged by clicking on them.)
Publications
R. Van Ham, T. Sugar, B. Vanderborght, K. Hollander & D. Lefeber IEEE Robotics and Automation Magazine, nr 3, vol.16, pp.81 - 94 abstract and pdf MACCEPA, the mechanically adjustable compliance and controllable equilibrium position actuator: Design and implementation in a biped robot R. Van Ham, B. Vanderborght, M. Van Damme, B. Verrelst & D. Lefeber Robotics and Autonomous Systems, Volume: 55, N� in volume: 10, pp: 761 - 768, published by: Elsevier, ISBN-ISSN: 0921-8890 abstract and pdf More infoMore info about this actuator and its applications can be obtained from Ronald Van Ham (email). Up |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


©2019 • Vrije Universiteit Brussel • Dept. MECH • Pleinlaan 2 • 1050 Elsene
• Tel.: +32-2-629.28.06 • Fax: +32-2-629.28.65 • webmaster