Vrije Universiteit Brussel
Robotics and MultiBody Mechanics Research Group ICRA workshop on tactile sensing in robotics applicationICRA workshop about tactile sensing in robotics applicationWe live in a world rich in diversity and material properties. The uniqueness of objects is something humans instinctively feel and interpret. Robots already move with actuators, see with cameras, and hear with microphones. But can they truly feel their surroundings? Can they grasp delicate objects, those that bend, break, or deform, while accounting for each object's physical properties? This workshop introduces a new technology: 3D force sensing based on Hall-effect sensors, capable of measuring both normal and shear forces. You'll work in teams to build a two-finger gripper, integrate this sensor, and deploy it in a real robotic application. Through hands-on experiments, you'll observe how tactile feedback improves manipulation, learn how force signals relate to interaction dynamics, and understand why a sense of touch is essential for safe, precise, and adaptable robot Behavior.
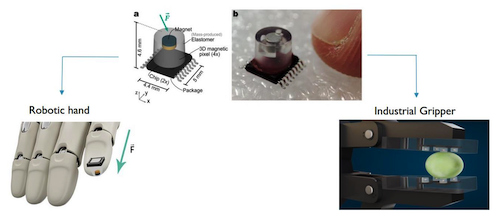
This short lectures and activity first covers the principle of the 3D touch sensor on itself: how it works, his advantage/disadvantage, comparison of the state if the art and then, we will focus how to integrate this sensor into a robotic application: cover contact modeling, slip detection, calibration, and impedance/admittance control. We then implement an end-to-end autonomous manipulation pipeline with a force- controlled execution, culminating in live tests on diverse objects. Attendees will get open-source designs, code, plus practical best practices for deploying touch- enabled manipulation. The goal is to equip and teach researchers and people working in robotics how to achieve more robust, safe, and dexterous robotic grasping in real-world environments. This discussion and workshop will be accessible to a broad audience, not just experts, so everyone can grasp the principles, learn, and integrate them into their own use cases if needed. We'll begin by introducing a 3D force sensor, with someone from Melexis: its operating principles, underlying technology, and why it matters for robotic applications. After that, VUB researchers will follow with a concise talk on grasping theory (key challenges, design trade-offs, and best practices). Attendees will then build a simple two-finger gripper from scratch, integrate the sensor, and interface it using ROS 2 (a code with docker will be provided, so they can run the code and have all the specific package on their computer). All materials (kits with 3D part and screws, code, and a step-by-step guide) will be provided in advance and on-site, and our team will be available throughout for support. Our goal is to make the presentation accessible to everyone: early-career and senior researchers alike, so all can follow the explanations. With this emerging technology and the growing role of robotic touch, everyone should learn something new.
Video of the ConceptFormat
Contact informationMilan.Francois.T.Amighi@vub.be Up |
||||||||
©2019 • Vrije Universiteit Brussel • Dept. MECH • Pleinlaan 2 • 1050 Elsene
• Tel.: +32-2-629.28.06 • Fax: +32-2-629.28.65 • webmaster